枚举:效率高
bool锁:只赋值一次


枚举:效率高
bool锁:只赋值一次
mainmanager入口管理器:管理多个入口
http://www.fonts.net.cn/
RemoteAssetFac
Character
EnemyAttackState
EnemyChaseState
EnemyFSMSystem
IEnemyState
SoldierAttackState
SoldierChaseState
SoldierIdleState
依赖倒转原则(针对接口编程)
1.细节依赖于抽象
2.底层依赖于高层
3.实现与高层交互
1.游戏脚本和游戏对象组件分离开发
1.里氏替换原则和单一职责原则
win键+R->mstsc 接入远程主机。
三种玩法(悔棋、更换先手)
1. 本机对战
2. 人机对战
(1)入门
(2)进阶
(3)高手
3. 联网
(1)局域网
(2)因特网 多人匹配系统
()
aaaaaa
Rifle
Rookie
Sergeant
CampInfoUI
GamePause
GameStateInfoUI
SoldierInforUI
续矩阵知识总结-变换总结
--------------------------
行列式性质
1. 行列式与它的转制的值相等 D^T = D
2. 互换行列式两行(列),行列式变号
3. 行列式某一行(列)中所有元素都乘以同一数k,等于用k乘此行列式
4. 如果行列式中如果有两行(列)元素成比例,行列式D = 0
5. 若行列式中某一行(列)的元素都是两数之和,可以把行列式分开写
6. 把行列式某一行(列)的各元素乘以同一数后加到另一行(列)对应元素上,行列不变
==========================================================
代数余子式
A = (-1)^(i+j) M_(ij)
一个n阶行列式,如果其中第i行所有元素除(i,j)元以外都是0,则这个行列式等于 a_(ij) 与它代数余子式的乘积。
D = a_(ij) A_(ij)
行列式等于它的任意一行(列)的各个元素与其对应的代数余子式乘积之和。
D = a_(i1) A_(i1) + a_(i2) A_(i2) + ... + a_(in) A_(in) (i = 1,2, ... , n)
D = a_(1j) A_(1j) + a_(2j) A_(2j) + ... + a_(nj) A_(nj) (j = 1,2, ... , n)
==========================================================
逆矩阵
M(M^(-1)) = M^(-1) M = I
逆矩阵计算公式
M^(-1) = ( adjM )/ ( |M| )
note:adj M 表示 M的伴随矩阵
逆矩阵特性
1) 如果M是非奇异矩阵,则该矩阵的逆的逆等于原矩阵:(M^(-1))^(-1) = M;
2) 单位矩阵的逆是它本身:I^(-1) = I;
3) 矩阵转置的逆等于它的逆的转置:(M^T)^(-1) = ( M^(-1) )^T;
4) 矩阵乘积的逆等于矩阵的逆的相反顺序的乘积:(AB)^(-1) = B^(-1) A^(-1);
5) 根据4) 可拓展到多个矩阵的情况:(M_1 M_2 ... M_n)^(-1) = (M_n)^(-1) (M_(n-1))^(-1) ... (M_1)^(-1);
==========================================================
正交矩阵
M 正交 <=> M M^T = I
M 正交 <=> M^T = M^(-1)
r_1 · r_1 = 1 r_1 · r_2 = 0 r_1 · r_3 = 0
r_2 · r_1 = 0 r_2 · r_2 = 1 r_2 · r_3 = 0
r_3 · r_1 = 0 r_3 · r_2 = 0 r_3 · r_3 = 1
正交矩阵满足条件:
1) 矩阵的每一行都是单位向量
2) 矩阵的所有行相互垂直
正交基:
如果一组向量互相垂直,这组向量就被称作正交基。
标准正交基:
如果一组向量互相垂直并且所有向量都是单位向量,则称为标准正交基。
==========================================================
4 x 4 阶平移矩阵
┌ 1 0 0 0 ┐
[ x y z 1 ] =│ 0 1 0 0 │ = [ x+Δx y+Δy z+Δz 1]
│ 0 1 0 0 │
└ Δx Δy Δz 1 ┘
┌ r_11 r_12 r_13 0 ┐ ┌ 1 0 0 0 ┐ ┌ r_11 r_12 r_13 0 ┐
M = RT =│ r_21 r_22 r_23 0 │ │ 0 1 0 0 │ = │ r_21 r_22 r_23 0 │
│ r_31 r_32 r_33 0 │ │ 0 1 0 0 │ │ r_31 r_32 r_33 0 │
└ 0 0 0 1 ┘ └ Δx Δy Δz 1 ┘ └ Δx Δy Δz 1 ┘
==========================================================
仿射变换

=========================================================
透视投影
┌ x ┐ ┌ -dx/z ┐
p' = │ y │ = │ -dy/z │
└ z ┘ └ -d ┘
┌ 1 0 0 0 ┐
[ x y z 1 ] =│ 0 1 0 0 │ = [ x y z z/d]
│ 0 1 0 1/d│
└ 0 0 0 0 ┘
=========================================================
变换分类
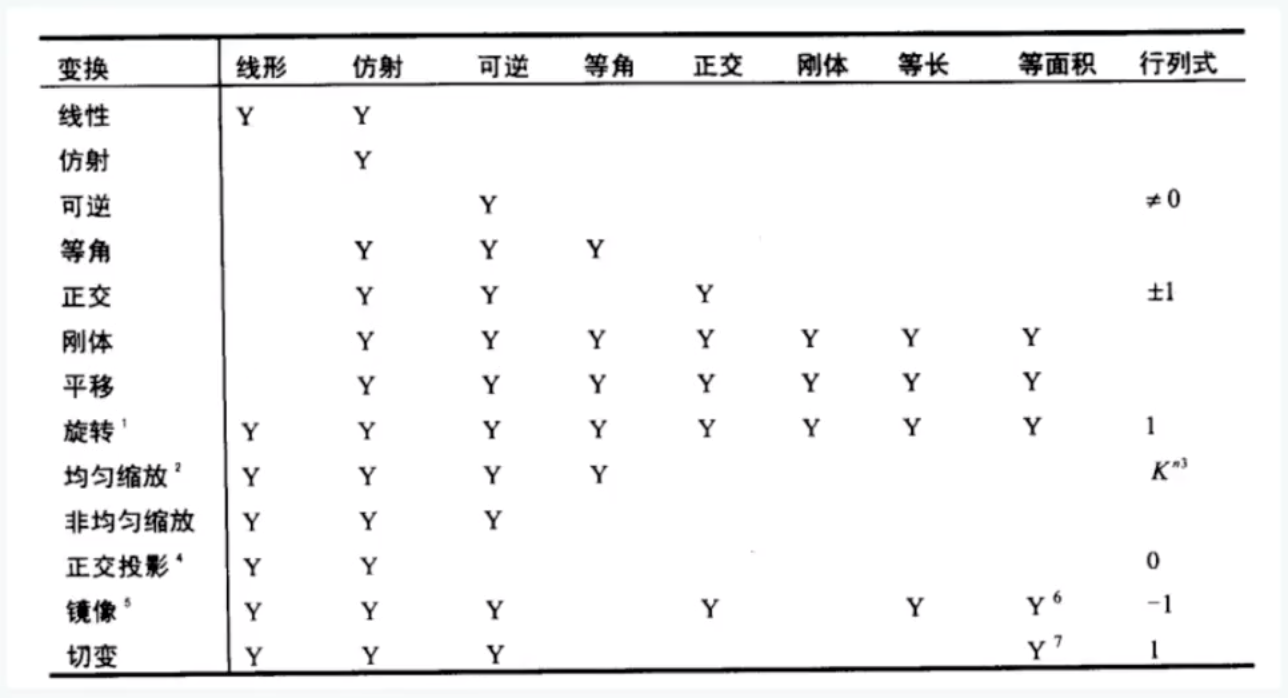
=========================================================
空间变换
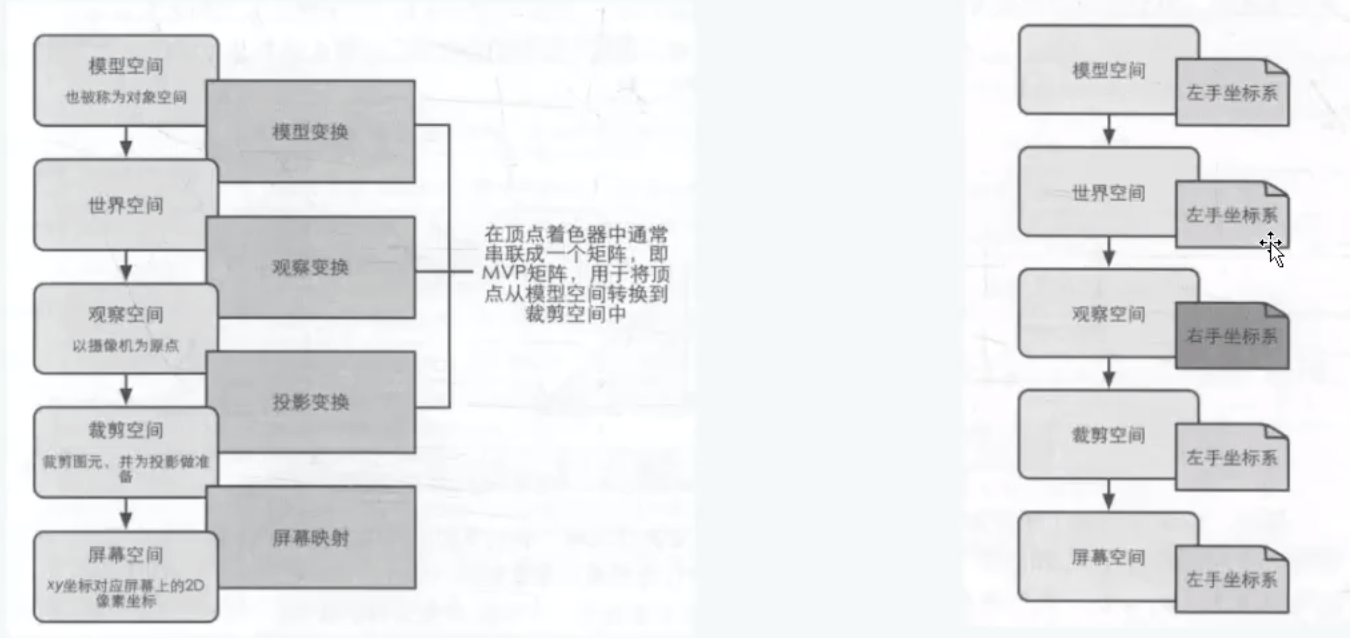
=========================================================
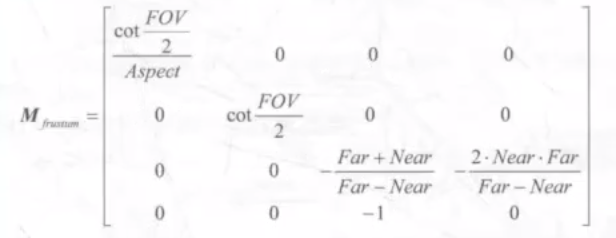
Unity 中透视投影矩阵
┌ n/r 0 0 0 ┐
│ 0 n/t 0 0 │
│ 0 1 -(f+n)/(f-n) (-2fn)/(f-n) │
└ 0 0 -1 0 ┘
存在Zfighting问题:
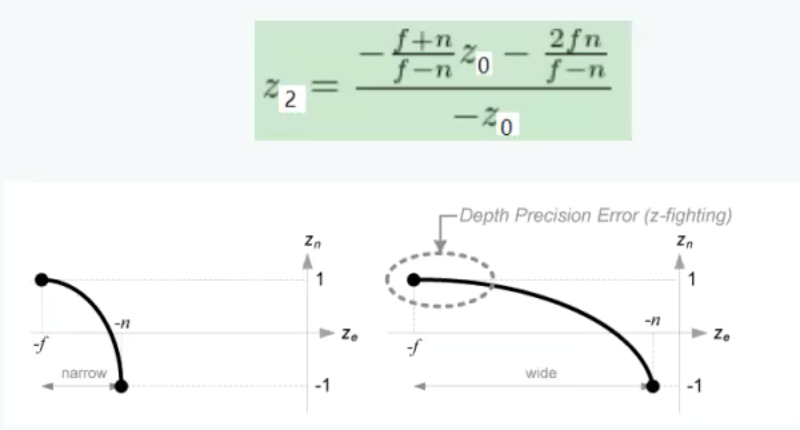
通过上述转换,得到的z值不是线性的,所以为了更精确的表达,所以希望远平面与近平面尽量接近
投影的FOV表达式
=========================================================
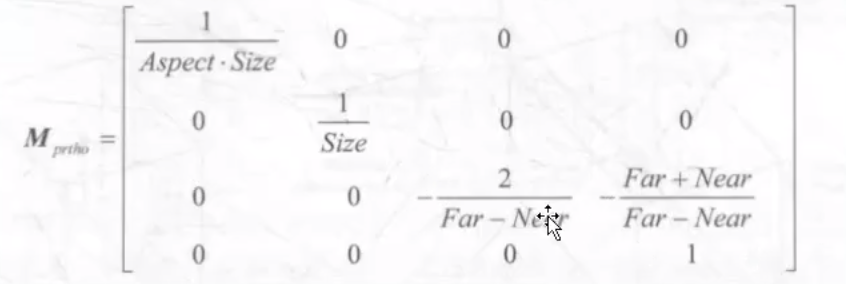
Unity 中正交投影矩阵
┌ 1/r 0 0 0 ┐
│ 0 1/t 0 0 │
O = │ 0 1 -2/(f-n) (f+n)/(f-n) │
└ 0 0 -1 0 ┘
改变成Unity的形式
逆矩阵计算及性质
--------------------------
特性
M 变化之后 可以用 M^(-1) 变化回去;
(M^(-1))^(-1) = M;
I^(-1) = I;
(M^T)^(-1) = ( M^(-1) )^T;
(AB)^(-1) = B^(-1) A^(-1);
(M_1 M_2 ... M_n)^(-1) = (M_n)^(-1) (M_(n-1))^(-1) ... (M_1)^(-1);
矩阵知识总结
--------------------------
矩阵乘法特点:
1) MI = IM = M //矩阵乘以单位矩阵 等于 单位矩阵乘以矩阵
2) AB ≠ BA //矩阵不满足交换律
3) (AB)C = A(BC) //矩阵满足结合律
4) (kA)B = k(AB) = A(kB) //矩阵满足线性运算律
5) (vA)B = v(AB) //满足向量运算的结合律
6) (AB)^T = B^T A^T // 矩阵AB的转置 等于 矩阵B的转置乘以矩阵A的转置
7) (M_1 M_2 ... M_n)^T = (M_n)^T (M_(n-1))^T ... (M_1)^T
==========================================================
向量与矩阵相乘
1) 行向量只能左乘矩阵 //适用于DX
2) 列向量只能右乘矩阵 //适用于OpenGL
==========================================================
矩阵旋转
二维旋转矩阵
┌ p' ┐ ┌ Cosθ Sinθ ┐
R(θ) = └ q' ┘ └ -Sinθ Cosθ ┘
三维旋转矩阵
X轴旋转
┌ p' ┐ ┌ 1 0 0 ┐
R(θ) = │ q' │ │ 0 Cosθ Sinθ │
└ r' ┘ └ 0 -Sinθ Cosθ ┘
Y轴旋转
┌ p' ┐ ┌ Cosθ 0 -Sinθ ┐
R(θ) = │ q' │ │ 0 1 0 │
└ r' ┘ └ Sinθ 0 Cosθ ┘
Z轴旋转
┌ p' ┐ ┌ Cosθ Sinθ 0 ┐
R(θ) = │ q' │ │ -Sinθ Cosθ 0 │
└ r' ┘ └ 0 0 1 ┘
任意n轴旋转矩阵
┌ p' ┐ ┌ (n_x)^2(1-Cosθ)+Cosθ n_xn_y(1-Cosθ)-n_zSinθ n_xn_z(1-Cosθ)+n_ySinθ ┐
R(n,θ) = │ q' │ = │ n_xn_y(1-Cosθ)+n_zSinθ (n_y)^2(1-Cosθ)+Cosθ n_yn_z(1-Cosθ)-n_xSinθ │
└ r' ┘ └ n_xn_z(1-Cosθ)-n_ySinθ n_yn_z(1-Cosθ)+n_xSinθ (n_z)^2(1-Cosθ)+Cosθ ┘
==========================================================
矩阵缩放
二维沿轴缩放矩阵
┌ k_x 0 ┐
S(k_x, k_y) = └ 0 k_y ┘
三维沿轴缩放矩阵
┌ k_x 0 0 ┐
S(k_x, k_y, k_z) = │ 0 k_y 0 │
└ 0 0 k_z ┘
二维沿任意方向缩放矩阵
┌ p' ┐ ┌ 1 + (k-1)(n_x)^2 (k-1)n_xn_y ┐
S(n,k) = └ q' ┘ = └ (k-1)n_xn_y 1 + (k-1)(n_y)^2 ┘
note:缩放系数k,缩放轴n;
三维沿任意方向缩放矩阵
┌ p' ┐ ┌ 1 + (k-1)(n_x)^2 (k-1)n_xn_y (k-1)n_xn_z ┐
S(n,k) = │ q' │ = │ (k-1)n_xn_y 1 + (k-1)(n_y)^2 (k-1)n_yn_z │
└ r' ┘ └ (k-1)n_xn_z (k-1)n_zn_y 1 + (k-1)(n_z)^2 ┘
==========================================================
正交投影
二维
向X轴投影
┌ 1 0 ┐
p_x = S([ 0, 1 ], 0) =└ 0 0 ┘
向Y轴投影
┌ 0 0 ┐
p_y = S([ 1, 0 ], 0) =└ 0 1 ┘
向任意直线投影的2D矩阵
┌ 1 - (n_x)^2 -n_x n_y ┐
p(n) = S(n,0) = └ -n_x n_y 1 - (n_y)^2 ┘
三维
向XY平面投影
┌ 1 0 0 ┐
p_xy = S([0, 0, 1], 0) =│ 0 1 0 │
└ 0 0 0 ┘
向XZ平面投影
┌ 1 0 0 ┐
p_xz = S([0, 1, 0], 0) =│ 0 0 0 │
└ 0 0 1 ┘
向YZ平面投影
┌ 0 0 0 ┐
p_yz = S([1, 0, 0], 0) =│ 0 1 0 │
└ 0 0 1 ┘
向任意平面投影的3D矩阵
┌ 1 - (n_x)^2 -n_x n_y -n_x n_z ┐
p(n) = S(n,0) = │ -n_x n_y 1 - (n_y)^2 -n_y n_z │
└ -n_x n_z -n_z n_y 1- (n_z)^2 ┘
==========================================================
切变
2D切变矩阵
┌ 1 0 ┐
H_x(s) = └ s 1 ┘
┌ 1 s ┐
H_y(s) = └ 0 1 ┘
3D切变矩阵
┌ 1 0 0 ┐
H_(xy)(s,t) = │ 0 1 0 │
└ s t 1 ┘
┌ 1 0 0 ┐
H_(xz)(s,t) = │ s 1 t │
└ 0 0 1 ┘
┌ 1 s t ┐
H_(yz)(s,t) = │ 0 1 0 │
└ 0 0 1 ┘
==========================================================
行列式
e.g.
| m_11 m_12 |
|M| = | m_21 m_22 | = m_11m_22 - m_12m_21
e.g.2
| m_11 m_12 m_13 |
|M| = | m_21 m_22 m_23 |
| m_31 m_32 m_33 |
|M| = m_11m_22m33 +m_12m_23m_32 + m_13m_21m_32 - m_13m_22m_31 - m_32m_23m_11 - m_21m_12m_33 ;

